Luis Felipe Casas Murillo

Current Research
I am part of the Intelligent Robotics and Vision Lab at the University of Texas at Dallas, where my research focuses on robotic manipulation. Particularly in developing solutions for robots to autonomously perform tasks in real-world settings to assist humans. I hold the view that achieving high skill levels in engineering demands hard work,
and one's abilities are best demonstrated by overcoming challenges in their projects. Below you will find the projects I've been a part of that were published in scientific journals:
RobotFingerPrint: Unified Gripper Coordinate Space for Multi-Gripper Grasp Synthesis
Ninad Khargonkar, Luis Felipe Casas, Balakrishnan Prabhakaran, Yu Xiang
Abstract: We introduce a novel representation named as the unified gripper coordinate space for grasp synthesis of multiple grippers. The space is a 2D surface of a sphere in 3D using longitude and latitude as its coordinates, and it is shared for all robotic grippers. We propose a new algorithm to map the palm
surface of a gripper into the unified gripper coordinate space, and design a conditional variational autoencoder to predict the unified gripper coordinates given an input object. The predicted unified gripper coordinates establish correspondences between the gripper and the object, which can be used in an optimization problem to solve the grasp pose and the finger joints for grasp synthesis. We demonstrate that using the unified gripper coordinate space improves the success rate and diversity in the grasp synthesis of multiple grippers.
Khargonkar, N., Casas, L. F., Prabhakaran, B., & Xiang, Y. (2024). RobotFingerPrint: Unified Gripper Coordinate Space for Multi-Gripper Grasp Synthesis. arXiv preprint arXiv:2409.14519.

MultiGripperGrasp: A Dataset for Robotic Grasping from Parallel Jaw Grippers to Dexterous Hands
Luis Felipe Casas, Ninad Khargonkar, Balakrishnan Prabhakaran, Yu Xiang
Abstract: We introduce a large-scale dataset named MultiGripperGrasp for robotic grasping. Our dataset contains 30.4M grasps from 11 grippers for 345 objects. These grippers range from two-finger grippers to five-finger grippers, including a human hand. All grasps in the dataset are verified in Isaac Sim to classify them as successful and unsuccessful grasps. Additionally, the object fall-off time for each grasp is recorded as a grasp quality measurement. Furthermore, the grippers in our dataset are aligned according to the orientation and position of their palms, allowing us to transfer grasps from one gripper to another. The grasp transfer significantly increases the number of successful grasps for each gripper in the dataset. Our dataset is useful to study generalized grasp planning and grasp transfer across different grippers.
Luis Felipe Casas, Ninad Khargonkar, Balakrishnan Prabhakaran, Yu Xiang. "MultiGripperGrasp: A Dataset for Robotic Grasping from Parallel Jaw Grippers to Dexterous Hands" arXiv:2403.09841v1, March 2024. To be presented at IROS 2024 https://doi.org/10.48550/arXiv.2403.09841


Past Research
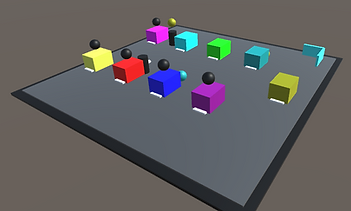
A Reinforcement Learning Simulation Environment for Optimizing Flexible Assembly Shops with Multiple Agents.
Abstract- Nowadays factories are challenged with high product customization, increasing product complexity, and the need for shorter lead times. Consequently, companies require Flexible Assembly Systems (FAS) to remain competitive within their markets. Within FAS, the layout of the shop floor and the scheduling of jobs must be performed repeatedly to efficiently assemble the products. Both the Job Shop Scheduling Problem (JSSP) and the layout planning represent combinatorial optimization problems with NP-hardness given that no optimal solution can be found in a reasonable amount of time. Reinforcement Learning (RL) has been successfully used to partially solve such problems. Moreover, RL methods have outperformed the multiple alternative methods they have been compared with. However, the training environments used within the current state-of-the-art applications portray a static representation of today’s FAS. In this work, a highly configurable environment is proposed for optimizing FAS with multiple RL agents. Consequently, the agents can be trained rapidly within different FAS configurations, meaning different layouts and Job Shop Problem (JSP) instances. The environment was created using the Unity simulator and the Unity ML-Agents Toolkit. Furthermore, an RL approach was selected for implementation within the environment and trained within multiple instances of different FAS configurations. The trained agents were then tested for performance with agent scalability, performance with job scalability, performance with JSP scalability, and their performance within different shop floor layouts. Additionally, Priority Dispatching Rules (PDR) were integrated into the environment and compared with the trained RL agents. The trained agents were able to outperform every PDR they were compared with. Finally, the environment’s visualization methods allowed for the analysis of agent behaviors, where the agents demonstrated noticeable preferences in actions while assembling the products.
Publication: Gannouni, A., Casas Murillo, L.F., Kemmerling, M., Abdelrazeq, A., Schmitt, R.H. (2023). Experimental Digital Twin for Job Shops with Transportation Agents. In: Sellmann, M., Tierney, K. (eds) Learning and Intelligent Optimization. LION 2023. Lecture Notes in Computer Science, vol 14286. Springer, Cham. https://doi.org/10.1007/978-3-031-44505-7_25
_PNG.png)

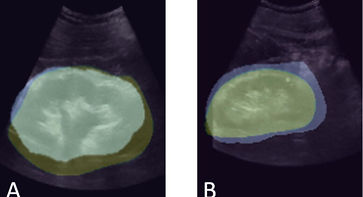
Background and objective: Hydronephrosis is essential in the diagnosis of renal colic. We automated the detection of hydronephrosis from ultrasound images to standardize the therapy and reduce the misdiagnosis of renal colic.
Methods: Anonymously collected ultrasound images of human kidneys, both normal and hydronephrotic, were preprocessed for neural networks. Six "state of the art" models were trained and cross-validated for the detection of hydronephrosis, and two convolutional networks were used for kidney segmentation. In the testing phase, performance metrics included true positives, true negatives, false positives, false negatives, accuracy, and F1 score, while the evaluation of the segmentation task involved accuracy, precision, dice, jaccard, recall, and ASSD.
Key findings and limitations: A total of 523 sonographic kidney images (423 nonhydronephrotic and 100 hydronephrotic) were collected from three different ultrasound devices. After training on this dataset, all models were used to evaluate 200 new ultrasound kidney images (142 nonhydronephrotic and 58 hydronephrotic kidneys). The highest validation accuracy (98.5%) was achieved by the AlexNet model (GoogLeNet 97%, AlexNet_v2 96%, ResNet50 96%, ResNet101 97.5%, and ResNet152 95%). The deeplabv3_resnet50 and deeplabv3_resnet101 reached a dice coefficient of 94.74% and 94.48%, respectively, on the task of automated kidney segmentation. The study is limited by analyzing only hydronephrosis, but this specific focus enabled high detection accuracy.
Conclusions and clinical implications: We show that our automated ultrasound deep learning model can be trained and used to interpret and segmentate ultrasound images from different sources with high accuracy. This method will serve as an automated tool in the diagnostic algorithm of acute renal failure in the future.
Patient summary: Hydronephrosis is crucial in the diagnosis of renal colic. Recent advances in artificial intelligence allow automated detection of hydronephrosis in ultrasound images with high accuracy. These methods will help standardize the diagnosis and treatment renal colic.
Radu Alexa, Jennifer Kranz, Rafael Kramann, Christoph Kuppe, Ritabrata Sanyal, Sikander Hayat, Luis Felipe Casas Murillo, Turkan Hajili, Marco Hoffmann, Matthias Saar. “Harnessing Artificial Intelligence for Enhanced Renal Analysis: Automated Detection of Hydronephrosis and Precise Kidney Segmentation” Eur Urol Open Sci, February 2024 , doi: 10.1016/j.euros.2024.01.017, Add to Citavi project by DOI PMID: 38585207 Add to Citavi project by Pubmed ID.